制御理論は、航空機やドローン・自動車など様々なモノを思い通りに操る為に利用されていますが、そのほとんどが、実際の複雑な動きのごく一部のみを時間経過とともに一定量変化するような単純な動きとみなして行う『線形制御』です。しかし、航空機が急激に機首を上げる動きや衛星の姿勢制御等をはじめ、現実のモノの動きを広範囲にわたり正確に操る為には『非線形制御』が非常に重要です。
そこで南山大学 理工学部機械システム工学科では、多様な場面で現実のモノの動きを正確かつ精密に操ることを可能とする非線形制御をベースとした『宇宙工学』、『航空機制御』、『メカトロニクス制御』、『制御理論』の4つのテーマについて研究を行っています。今回はSpeedgoatを用いて、EVパワートレーンに発生する振動の抑制制御開発を行いました。
Purpose
脱炭素社会・カーボンニュートラルの実現に向け、世界的に『脱ガソリン車・ディーゼル車』の動きが強まり、電気自動車(EV)にシフトする動きが加速しています。ただし、EV車両における様々な振動問題はエンジン車両とは異なる要因により引き起こされ、また、その抑制もエンジン車両におけるものより高いもの要求されます。特にパワートレーンにおける振動は、ギアのバックラッシュと干渉を引き起こすため、ドライバビリティや乗り心地に悪影響を及ぼす可能性があります。その為、振動自体の低減化が強く求められています。本プロジェクトでは、パワートレーンの捻じれ振動とギアのバックラッシュを含む実験装置を開発して、その振動抑制制御の開発を行いました。
MIS Solution
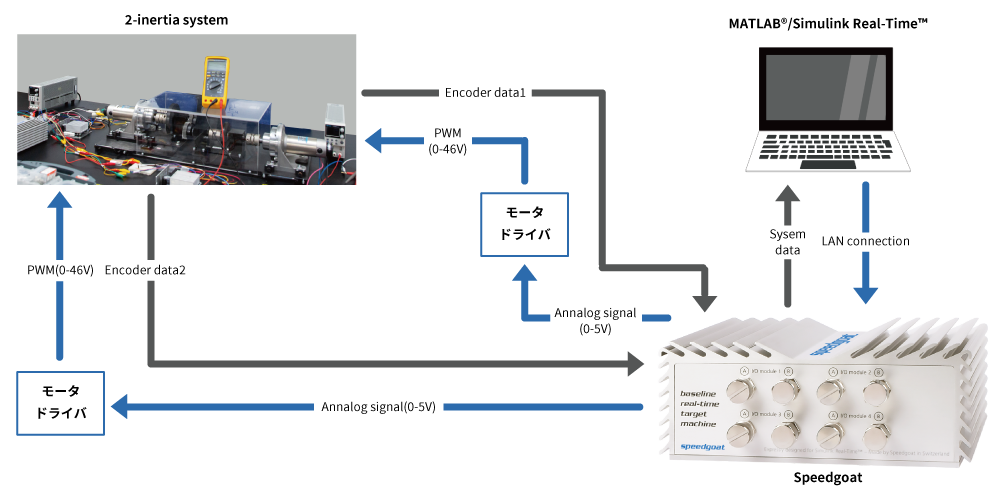
EVパワートレーンを模擬する装置では、駆動モータと負荷モータがあり、これらを高い精度で運用する必要があります。さらにギア系に存在するバックラッシュは、高度なシミュレーションモデルの開発を要し、フィードバック制御には高い処理能力を必要とします.そこで今回はSpeedgoatのBaseline S real-time target machineをコントローラとして採用し、モータのフィードバック制御を行いました。またMATLAB®/Simulink®を用いてカルマンフィルタ(オブザーバ)の設計を行い、バックラッシュ状態の推定なども行いました。この成果を用いて、ドライバビリティの高いモータ駆動系の設計を行っています。
Goal
Speedgoat製品はMATLAB®/Simulink®で設計した制御アルゴリズムを容易に実装できるため、以前使っていたコントローラと比べて圧倒的に効率的に作業が進められ、バックラッシュとパワートレーンの捩じり振動を抑える制御系の開発をスムーズに進められています。またシミュレーションと設計がシームレスに行えたことで、研究効率の向上にもつながりました。
今後は研究室内のプロジェクト以外にも、学科内の実験装置開発などにも採用していきたいと考えています。
MathWorks® Products
- MATLAB®
- Simulink®
- Simulink Real-Time™
- MATLAB Coder™
- Simulink Coder™