menu
製品情報
DSPボード
DSP8066-2
DSP8066-8
DSP8067B-SpecA
高速デジタル信号処理システム
SEAGULL/SEAGULL mini
EAGLE
モデルベースデザイン
Speedgoat
SEAGULL/SEAGULL mini
ROBIN
産業用組込みコンピュータ
産業コンピュータ
組込みコンピュータ
ファンレス組込みコンピュータ
BTOコンピュータ
車載・鉄道向けコンピュータ
産業用AIコンピュータ
EC3000
EC3100
EC3500
組込みCPUボード
ITX CPUボード
3.5inch 組込みボード
タッチパネルモニタ
iTM21
iTM19A1B/W
iTM17A1B/W
iTM15A1B/W
振動制御装置
iWAVE.NET/EX
信号変換器
MG SERIES
保守部品(新品)
保守部品一覧
事例紹介
事例紹介
事例紹介一覧
SEAGULL
Speedgoat
sBOXⅡ
ソリューション
航空宇宙開発でのRCP・HILSとSpeedgoatの活用
RCP向けリアルタイムシミュレータ
HILS向けリアルタイムシミュレータ
効率的なPLCのテスト
モーション制御プロトタイピング・PLCテスト(ウェビナー)
ファクトリーオートメーション
ビルオートメーション
ロジスティクス・DX
半導体製造装置
リテール・端末機器
ヘルスケアテクノロジー
オートモーティブ
インダストリアル オートメーション
食品・飲料検査ソリューション
パートナーソリューション
SpeedgoatとCarSimによる車両ダイナミクスシミュレーション
GT-SUITE/GT-POWERを活用したHILS
GT-SUITE/GT-POWERとSpeedgoatとの連携
超小型リアルタイム・ターゲットマシン+モータデモキットのご紹介
サポート
ダウンロード
カタログ
リーフレット
採用事例・ホワイトペーパ
Speedgoatマニュアル一覧
お問い合わせ
FAQ
マイページ
技術情報
MBD (モデルベースデザイン/モデルベース開発)
タッチパネルの仕組み
サイト内検索
生産終了品
企業情報
企業情報
CSR情報
採用情報
事例紹介
HOME
>
製品情報
>
事例紹介
事例紹介
弊社エンベデッド製品は自動車・航空宇宙・建設機械・産業用ロボット・半導体製造装置など幅広い産業用途でご採用いただいております。
実際にお使いいただいた事例をご紹介いたします。
SEAGULL
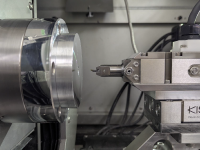
名古屋大学様
NEW
楕円振動切削装置の内部情報を用いた超精密加工のモニタリング
工具と工作物の相対位置や工具摩耗などの様々な切削プロセス情報をモニタリングする技術
東海大学様
超小型電気自動車の消音制御の研究
壁面振動を利用した超小型電気自動車のアクティブノイズコントロールシステムに関する研究
海上技術安全研究所様
港内操船時の操縦運動特性の推定手法に関する研究
自動離着桟アルゴリズム検証のための自由航走試験法による模型実験
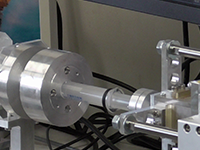
カヤバ株式会社様
電動アクチュエータの研究
油圧機器との置き換えを目指す電動アクチュエータの試作及び評価
信州大学様
不織布の自動縫製技術開発
人の指の機能を模擬したミニアームを用いた曲線形状の不織布を自動縫製するためのハンドリング技術開発
工学院大学様
液相成分選択拡散分離装置
液体を特定の周波数で加振し、物質を分離させる技術の開発
Speedgoat
海上技術安全研究所様
NEW
波力発電における制御法の開発
永久磁石同期型リニア発電機を採用した波力発電装置約1/20縮尺の模型を用いて開発した制御法の検証
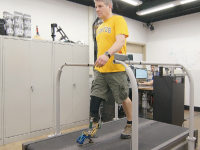
HuMoTech
ロボット義足開発
下肢義足患者の可動性及びQOL向上の為のロボット義足研究・開発
南山大学様
EVパワートレーンの振動抑制制御
Speedgoatを用いたEVパワートレーンに発生する振動の抑制制御開発
コベルコ建機株式会社様
自動運転油圧ショベルの制御開発
Speedgoat製品を用いた自動運転油圧ショベルの制御モデルの動作検証
株式会社両毛システムズ様
HILSによる自動運転シミュレーション
経済産業省の事業にて作成した成果物を基にしたデモ用自動運転シミュレーションの構築
株式会社コベルコ科研様
バッテリーの熱マネジメントシステムのHILS
バッテリーパックの熱マネジメントシステムにおける1Dモデル化の取り組みとHILSへの展開
広島大学様
データ駆動型スマートシステムプロジェクト(DDSS)
モデルベースデザインとDDSSによるフレキシブルな制御プラットフォームの構築及び、その産学連携
sBOXⅡ(生産終了品)
慶応義塾大学様-2
風力発電システムの個別ピッチ角制御に関する研究
ピッチングモーメントを用いた風速推定に基づく風力発電システムの個別ピッチ角制御
慶応義塾大学様-1
上肢外骨格型アシストロボットのアシストトルク制御に関する研究
上肢にロボットスーツのように装着し、モータのトルクで動作をアシストするロボットの研究
お問い合わせはこちら
ページ上部へ戻る