信州大学工学部・制御工学研究室では、制御理論を基礎とし、制御技術の産業応用,データサイエンスアプローチとの融合としての異常診断,制御工学からのシステム設計へのアプローチなどの研究に取り組んでいます。
特に、制御対象ありきの制御応用ではなく、設計上流から制御応用を意識したシステム設計へのアプローチにも取り組んでおり、農業分野への応用例としてほうれん草やレタスの自動収穫装置の開発に取り組んできました。
これらの装置では、制御応用によって実現可能な性能をシステム設計の当初から意識し、装置コンセプトを考えることで、既存の方法とは根本的に異なる特徴的な方法を見出しています。
 信州大学
信州大学
工学部 機械システム工学科
千田 有一先生
Purpose
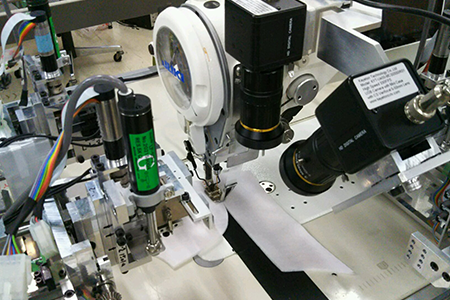
研究室では今回、不織布の自動縫製技術の開発に取り組みました。具体的には、曲線形状の不織布を自動縫製するためのハンドリング技術の構築です。人手による縫製作業と同様に、人の指の機能を模擬したミニアームによる機構を適切に動作させることで、布のハンドリングを行います。カメラによる布の位置と姿勢の検出とその情報に基づいたフィードバック制御によって、ミニアームを適切に制御し、柔軟布のハンドリングの実現を目指します。
MIS Solution
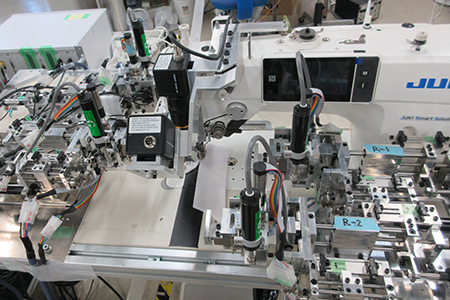
プロジェクトでは機構等の装置設計製作、カメラによるセンシングシステム構築、制御アルゴリズムの開発、実験検証を行いました。
センシングシステムについてはVisual Studio®とOpenCVを用いてC++にて構築し、制御アルゴリズムはMathWorks®社の製品を用いて、制御対象のモデリングとフィードバック制御性能のシミュレーション評価を行いました。
アームロボットは合計12自由度の機構を有しており、リアルタイム制御するため、入出力チャンネル数の多いDSPシステムを用いる必要がありました。
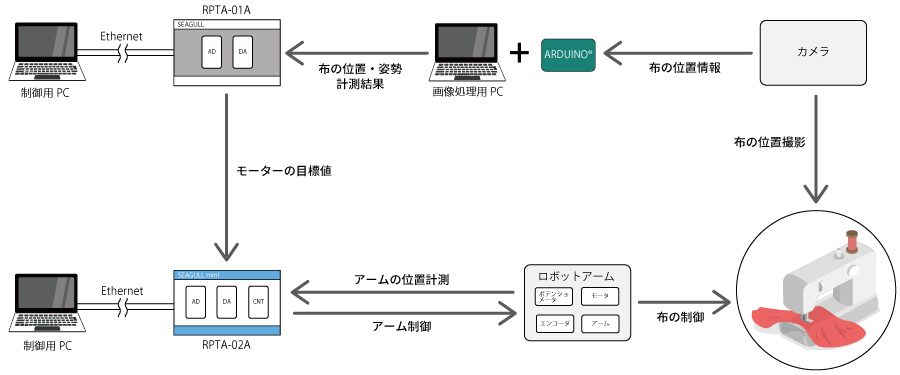
そこで、MISからは多軸に対応したDSPシステムとしてSEAGULLを提案しました。システム筐体は、実装できるIOの枚数が12枚の筐体(RPTA-01A)と5枚の筐体(RPTA-02A)を提案しました。I/Oについては、32ch同時入出力できるAD・DAボード、8chのカウンタ入力可能なボードにてご提案しました。
RPTA-01A・・・ロボット系の目標値の算出
- ポテンショメータ(リニア):各アームの指先の位置の計測
- モータ制御:ミシンへ布送り(送り歯稼働)するための電圧を出力
- データ通信:RPTA-02Aへモータの目標値を電圧値に変換し伝達
RPTA-02A・・・目標値への追従
- エンコーダ:各アーム軸の位置と速度(エンコーダの数値微分)計測
- モータ制御:モータドライバESCON 50/5へ指令値(電圧)を出力
- データ通信:RPTA-01Aからの電圧値の計測とモータ目標値への再変換
Goal
実験の結果、開発した装置によって、曲線の自動縫製実験に成功しました。
非常に短期間で制御システム(DSPシステム)を構築することができたため、早い段階で成果が得られました。今後は、より複雑な機構によって、より精密な縫製技術を確立するための検討に継続利用する予定です。
ソフトウェア
- MATLAB®
- Simulink®
- MATLAB Coder™
- Simulink Coder™
- System Identification Toolbox™
- Control System Toolbox™
- SEAGULL®I/Oブロック
- Pass/SEAGULL