広島大学大学院先進理工系科学研究科(Graduate School of Advanced Science and Engineering)のシステム制御論研究室(Control Systems Lab.: CSE Lab.)では,産業システムの高度化を目指した制御系設計論の開発を行っており、企業との共同研究に活発に取り組んでいる他、内閣府の地方大学・地域産業創生交付金事業に採択され大学と産業界が連携し,社会実装に向けた研究開発活動と,高度産業人材を育成する新たな拠点として、広島大学デジタルモノづくり教育研究センターを2019年2月に設立しました。センターは3つのプロジェクトによって構成され,そのプロジェクトの一つに「データ駆動型スマートシステム(DDSS)」プロジェクトがあります。DDSSプロジェクトでは、システム制御論研究室で培われたシーズ技術を発展させる為,特にモデルベースデザイン(MBD)とデータ駆動型制御のインタープレイによる新しい制御系設計にかかわる研究開発分野に注力しています。
Purpose
前述の通り,DDSSプロジェクトでは,ビークルシステムをはじめ建設機械,冷凍プロセス,成型プロセスなど様々な産業分野の企業との共同研究を実施し、MBDアプローチとデータ駆動型アプローチのインタープレイによる新しい開発プラットフォームを構築すると共に,産学連携を通して、その実装に向けた活動を行っています。これらの活動を通して,あらゆる産業システムに適用可能なフレキシブルなスマート制御プラットフォームの構築を目指していますが、企業との共同研究においては以下のような問題に直面することが多く,デバッグ作業を含め数年かかるなど,成果の創出には多大な労力と時間を要していました。
- 制御アルゴリズムの検討の際に,プラントモデルが必要となるが,プラントモデルがない,あるいは実際の現場環境を再現できず、MATLAB®/Simulink®で構築した制御アルゴリズムの検討ができないという場面が多数あり,最終的には制御アルゴリズムを,直接,実際のコントローラに実装するというケースが頻発した。
- MATLAB/Simulink®などで構築した制御アルゴリズムを、各企業のシステムに合わせてハンドコーディングしなおす必要があり,実装化に膨大な時間を要した。
- コーディング作業では多くバグが発生し,実際の現場と研究室を何度も往復する必要があった。
- アルゴリズムのパラメータ調整を実際の機器を動かしながらトライ&エラーで実施する必要があり,応答の遅いシステム(例:熱プロセスシステム)などでは、パラメータ調整に膨大な時間を要した。
- 1~4の作業は,研究が進み制御アルゴリズムが高度化・複雑化するにつれて大きな負担となってきたとともに,構築される制御システムの保守・管理も困難になってきた。
MIS Solution
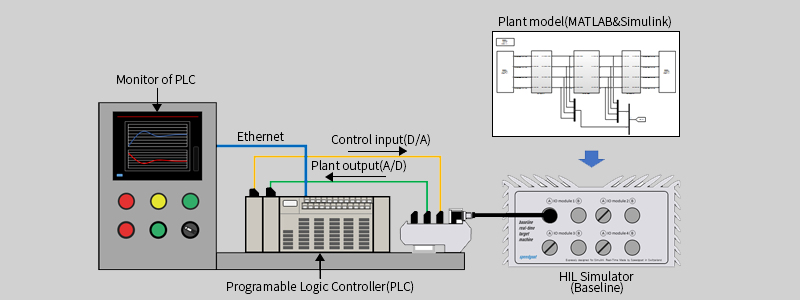
はじめにプラントモデルの設計においては機械・電気・流体などの複合したシステムのモデリングを統一的な環境で実現する必要があるため、MATLAB®/Simulink®でsimscape™などを中心とした第一原理に基づく1Dモデリング環境を提供しました。 またModel In the Loop Simulation(MILS)による制御系の設計、パラメータ調整および性能評価にもMATLAB®/Simulink®を使用することで応答の遅いシステムでも効率的にパラメータなどの調整ができるソリューションを提供することができました。 次に、制御系設計で、試作されたコントローラをHardware In the Loop Simulation (HILS)によって評価するため、1Dプラントモデルのリアルタイム実行環境として、Simulink®からMILSモデルをシームレスに実装できるPerformance real-time target machine, Baseline real-time target machine, unit real-time target machineを提案しました。 さらにSimulink®のシミュレーションデータインスペクター機能を利用し、リアルタイムに制御結果を確認できることで、これまで発生していたバグやトラブルの発生を抑制しました。
Goal
上記ソリューションにより、シミュレーションモデルさえあれば、その日のうちに実装し、実験データを取得することが可能となりました。PLC(Programable Logic Controller)を用いたシステムのHILSシミュレーションを例に取りますと、実験環境がおよそ1か月で構築でき、現在提案アルゴリズムの実装化について検証を進めています。また、企業側がMATLAB®/Simulink®を用いた製品システムの1Dモデルを構築することにより、研究室で構築された制御アルゴリズムとのスムーズな連携を図ることができ、実装前にMILSによってさまざまなシナリオにおける検証が行えるようになってきています。 さらにSimulinkモデルは視認性が高く、結果としてたくさんのソースファイルを管理するよりもはるかに効率的にモデルを管理することができるようになりました。このように,MATLAB®/Simulink®およびSpeedgoat製品の強力なサポートによって、アルゴリズムの実装化や制御システムの構築が驚くべきスピードで行われ、プロジェクト発足から3年足らずで多くの成果が創出されています。
MathWorks® Products
- MATLAB®
- Simulink®
- MATLAB Coder™
- Simulink Coder™
- Simulink real-time™
- Control System Toolbox™