Human Motion Technologies(HuMoTech)は創設者で代表のJosh Caputo氏の博士論文を基に、Carnegie Mellon大学のバイオメカトロニクス研究室からのスピンオフ企業です。ペンシルバニア州ピッツバーグに拠点を置き、2015年設立されました。中小企業ながらも大きなビジョンと熱意のあるチームで急成長を遂げています。彼らはSpeedgoatとMathWorks®ソリューションを用いて、下肢義足患者の可動性・QOLを改善するための研究・開発を行いました。
Purpose
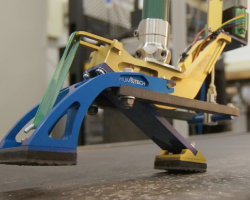
下肢切断は可動性の低下に加え、生活への悪影響を及ぼす身体障害です。下肢切断患者が歩行する際は、より多くのエネルギーを消費し、他の手足へ負荷が増大するため、新たな怪我につながる可能性があります。足首の関節が正常に機能している場合、”Terminal Stance(立脚後期※1)”と呼ばれる歩行周期※2の段階で大きな機械的床反力が発生します。この作用は”プッシュオフ※3”として知られ、受動的な足首の人工関節ではかなり軽減されます。この分野の研究をさらに深める為、HuMoTechは様々な足首の動きの再現やプッシュオフを増大させることができる人工足首義足を開発しました。
※1 Terminal Stance(立脚後期)・・・片方の踵が地面から離れ、もう片方の足が地面に接触する瞬間
※2 歩行周期・・・大きく立脚期と遊脚期に分かれた、人の歩行(2歩を1周期)を周期で分割したもの
※3 プッシュオフ・・・片方の下肢のTerminal Stance期における後方への蹴りだし
MIS Solution
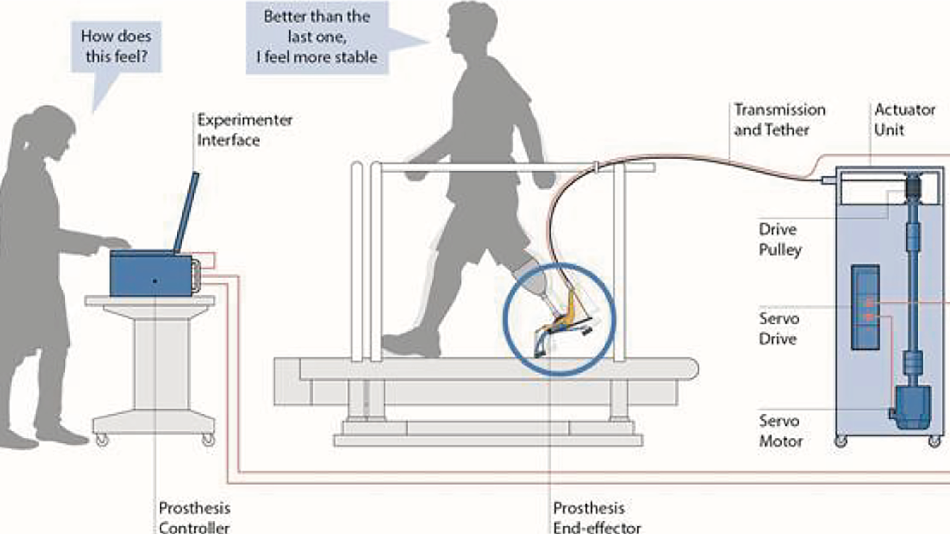
HuMoTechの義足は足首の軸を中心にトルク制御します。キール部分は外部アクチュエータユニットで制御されることにより、ヒールスプリングはキール部分と連動して、歩行周期の”Early Stance(踵接地期)”で動きます。トルクの回転はロードセルで計測され、関節の角度は光学式エンコーダで計測されます。この外部アクチュエータユニットもHuMoTechが開発しており、サーボモータ・サーボドライブ・ドライブプーリで構成されています。トルクはボーデンケーブル※4を通じて義足に伝達されます。高性能なトルク制御の信号は、実際の足首義足のトルク回転角度と義足関節角度を基に決定されます。SpeedgoatのPerformance real-time target machineはこのようなトルクや角度をロードセル及びエンコーダから取得し、足首関節のインピーダンスを調整するモータへの指示を行いました。またインターフェースと制御コードはMATLAB®/Simulink®で開発され、オートコードによりtarget machineを動作させました。
Carnegie Mellon大学の研究者たちは、既に人口足首義足を用いた実験を行っており、それらの結果が歩行に対するプッシュオフの影響や、腰の動き、代謝エネルギー消費量などの相互作用をより深く理解することにつながりました。また代表のJosh Caputoは『Speedgoatは性能・価格・モジュール・MATLAB®/Simulink®との親和性に優れ、完璧なソリューションを提供してくれた』と話しています。
※4 ボーデンケーブル・・・インナーケーブルが他のケーブルと相対的に動いて、力などを伝達するフレキシブルケーブル
アメリカにある様々な大学や研究組織はこの義足を用いて研究を進めており、HuMoTechはこの義足をさらに改良し拡大していきます。また、彼らは患者のテスト歩行アシストデバイスとして使用できる臨床製品の開発にも成功しました。今後は、よりカスタマイズ可能なソリューションを提供するため、Speedgoat Baseline real-time target machineのオープンフレームをアクチュエータユニットに統合させる計画も進めています。