海上技術安全研究所では、自動運航船を実現するための研究開発として、自動運航船の安全性評価手法、自動着桟アルゴリズムの実証、避航操船システムの開発、遠隔監視・遠隔操船システムの開発等の技術開発を行っています。近年、無人での船舶運航を最終目標とした船舶の自律運航に関する研究開発が国際的に加速され、国内に於いてもMEGURI2040という船舶無人運航のための実証実験プロジェクトが2020年にスタートしています。この総合的な技術開発の中で、他船の自動避航や岸壁への着桟や離桟の自動化(自動離着桟)などの自動操船に関する技術は個船ごとの操縦性能を考慮した自動操縦アルゴリズムであることが求められます。そもそも、水上を走る船舶は、地上を走る車のブレーキに相当するような制動力はなく、操縦は簡単ではありません。特に港への入出港における岸壁への離着桟などの操船では、プロペラを低速で回すため舵による制動効果が少なくなり、風や波による影響を受けやすくなることから、特に操縦が難しいケースと言われています。このため、自動離着桟の制御アルゴリズム開発はその検証がとても重要です。
そこで当研究所では、船舶の低速時操縦運動を予測できる計算手法、並びに自動離着桟アルゴリズムを検証するための模型試験技術に関する研究開発に取り組んでいます。
Purpose
自動離着桟アルゴリズムの検証をいきなり実船試験で行うのは制御失敗による事故を考慮するとリスクがあるため、船舶の操縦運動シミュレーションや縮尺模型を用いた水槽模型試験で事前に検証しておくことが重要です。本研究では模型試験による自動離着桟アルゴリズム検証手法の開発を行っています。具体的には、自由航走する模型船のプロペラ回転と舵を自動離着桟アルゴリズムに沿って制御し、想定する離着桟操船が可能かどうかを模型船の操縦運動を通じて検証します。ここで、実船の船型をそのまま縮めた縮尺模型において、水の粘性に起因する尺度影響と呼ばれる影響により、縮尺上で実船と相似な操縦運動をしていても水による流体力が相似でないことが知られ、特に、船体の前後方向に作用する粘性抵抗は模型船の方が大きく、プロペラ回転中の船尾流場の有効流速は模型船の方が低い、という特性があります。よって、自走する模型船では実船相似な船速に到達するため、まずプロペラ回転数を実船相当値より高くする必要がありますが、そのためプロペラ回転流中にある舵の効力は実船相当より高くなります。以上により、自動離着桟アルゴリズムを自走する模型船にて検証しようとしても、実船相当ではないプロペラ推力や舵効きの下での検証となるため、例え模型船で自動離着桟が成功したとしても実船試験で同等の効果が得られる保証は無く、結局、実船尺度における自動離着桟アルゴリズムの再検証が必要になります。
さらに、本研究の自由航走模型試験では水槽内の曵引車が自走する模型船を自動で追尾する制御システムを用います。その際、模型船と曵引車の間にはケーブルで電源供給や信号通信を行いますが、ケーブルによる模型船への干渉は最小限に留める必要があります。本研究の模型船制御手法ではアナログ電圧の入出力信号が20から30程度あり、信号線数の抑制は実用上の課題でした。
MIS Solution
以上のような船舶流体力学上の背景と実用上の課題の下で、水槽試験で模型船に実船と相似な操縦運動をさせる手法に開発に取り組んできました。まず、ダクトファンシステムを用いて、空力による推力を発生させる補助推力装置を開発しました。この装置により、水中のプロペラ以外の手段で船に推進力を与えることが可能になります。更に、プロペラ回転流中の舵効きを実船相当にするためのプロペラ回転数の設定方法を開発し、前述の尺度間の粘性抵抗の差も考慮に入れた推進力を補助推力装置で適切に与えることで、模型船の操縦運動を合理的に実船相当にできる模型試験法を開発しました。加えて、離着桟操船時はプロペラ逆転や後進も伴うことから、このような状況における実船の舵効きも再現できるよう、最近の研究では離着桟操船時の舵効きを考慮できるように試験法の拡張を行いました。この拡張した水槽試験法(低速時舵効き修正法)を適用することで自動離着桟アルゴリズムで操船された模型船の操縦運動は実船に相似と言えるものとなるため、本来の尺度影響の自由航走模型試験でも実船に搭載する自動離着桟アルゴリズムをそのまま検証できることになります。更に、海上技術安全研究所では実船に作用する風による風圧力を模擬できる風荷重模擬装置を開発しています。この装置は補助推力装置と同様のダクトファン6基で構成されるもので、実船相当の風圧力及び回頭方向への風圧モーメントを模型船に与えることができます。
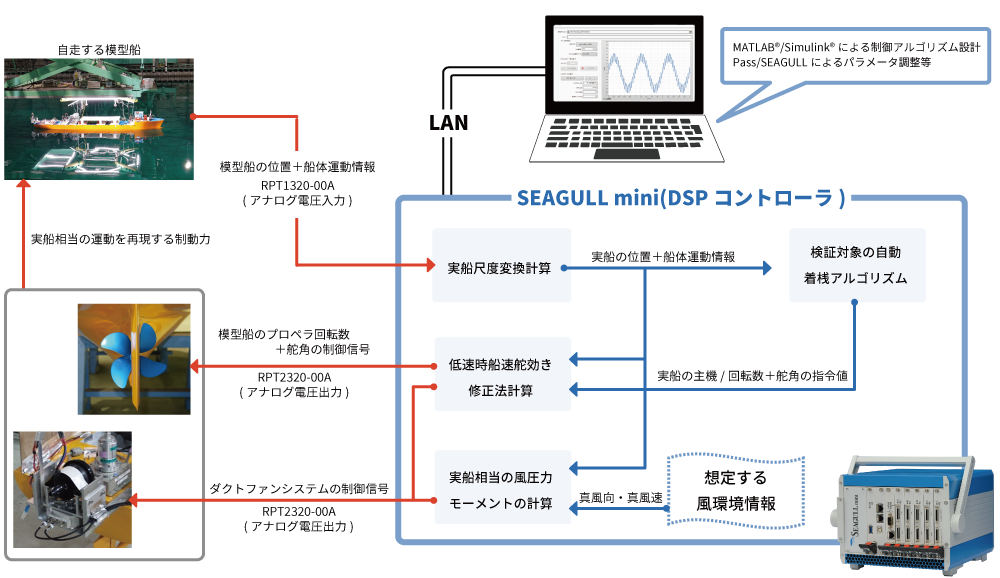
この装置を組み合わせて使う事で風環境下における自動離着桟アルゴリズムの検証も可能となり、より実用に適した検証ができるようになります。本研究では開発したこれらの水槽試験技術を実際に適用し、SEAGULL miniを用いて、同研究所で開発した自動着桟アルゴリズムを検証するデモンストレーションを行いました。具体的には、以下の処理を1ステップで行っています。
- (1) 模型船の位置及び船体運動情報の検出
- (2) (1)の検出情報をフルード相似則に則って実船尺度に換算
- (3) (2)の情報を自動着桟アルゴリズムに入力して次のタイムステップのプロペラ回転数及び舵角の指令値を計算
- (4-1) (2)の情報と(3)の指令値より、低速時船速舵効き修正法の計算を行って、模型船のプロペラ回転数と舵角及び補助推力装置の指令値を計算
- (4-2) (2)の情報と想定風環境の設定情報から実船相当の風圧力・モーメントを計算し、風荷重模擬装置の6基のダクトファンへの指令信号を計算
- (5) (4-1),(4-2)の指令信号を模型船のアクチュエータに出力
またSEAGULL miniは筐体が小さく比較的軽量であるため、本研究で対象とした模型船(長さ4m程度)では直接搭載することが可能です。そのため、ケーブル数を減らすことで実用上の課題が解決され、模型試験の品質向上ができました。
Goal
本研究で開発した模型試験手法及びSeagull miniを含んだ実験構成機器にて、当研究所で開発した自動着桟アルゴリズムについて模型試験を通じて実証することができました。このアルゴリズムは、小型船では既に実船試験が行われて有効性が示されていましたが、ある程度大型の船型であっても有効であったことは大きな収穫でした。一方で、厳しい風環境下では風圧力への一層の対策が必要であることも模型試験を通じて判明したため、課題の抽出にもなりました。今後の課題として、対象船型を同じとした上で実船試験と模型試験の比較を行って、開発した制御方法の理論的正当性や実用性に関する検証を行う必要があります。尚、本研究は現段階では基礎研究のフェーズですが、今後の自律運航船の就航隻数が増えていくことを見越して、最終的には自動操船アルゴリズム検証の1ツールとして確立されることを目指しています。
MathWorks® Products
- MATLAB®
- Simulink®
- MATLAB Coder™
- Simulink Coder™