慶応義塾大学大学院 理工学研究科 村上俊之先生の研究室では、ロボティクス・人間の動作解析・知能制御を応用し『人とロボットの強調』をテーマとした研究を行っています。研究テーマは①移動ロボットやドローンなどの移動モビリティに関する研究、②アシストロボットやリハビリロボットなどの人支援・動作解析研究、③バイラテラル制御を用いた遠隔操作が可能な協働ロボットの研究、④二足歩行ロボットや風力発電に関する研究の4つに分かれています。今回は、④に関連した『ピッチングモーメントを用いた風速推定に基づく風力発電システムの個別ピッチ角制御』(以降風力発電システムの個別ピッチ角制御研究)についてご紹介します。
Purpose
私たちの生活は、電気・ガスなどのエネルギーなしでは成り立たない社会となっていますが、このエネルギー生産において多くの二酸化炭素が排出され地球温暖化が悪化しています。その状況を打開するため、環境負荷の少ない再生可能エネルギーの導入が世界各国で進められています。その中でも風力発電は世界的に増えていく非常に重要な課題であり、今回は風力発電システムの個別ピッチ角制御について実験を行いました。本研究では、個別ピッチ角制御の従来手法と比較して、ブレードへの負荷やピッチレートを増やすことなく、ロータ速度を定格に抑えること目的としています。
- 高風速時でも安全に稼働ができるよう、風向きに対するブレードの向きを調節することで風を逃がし、ブレードの過回転を抑制すること
- 風がブレードを通過する際にブレードのねじる方向に発生するトルクを推定し、その推定値から風速を推定することで、より高精度なピッチ角制御を実現すること
MIS Solution
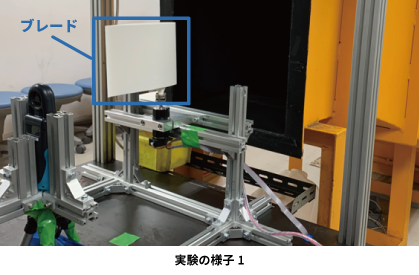
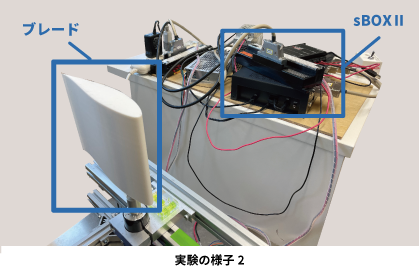
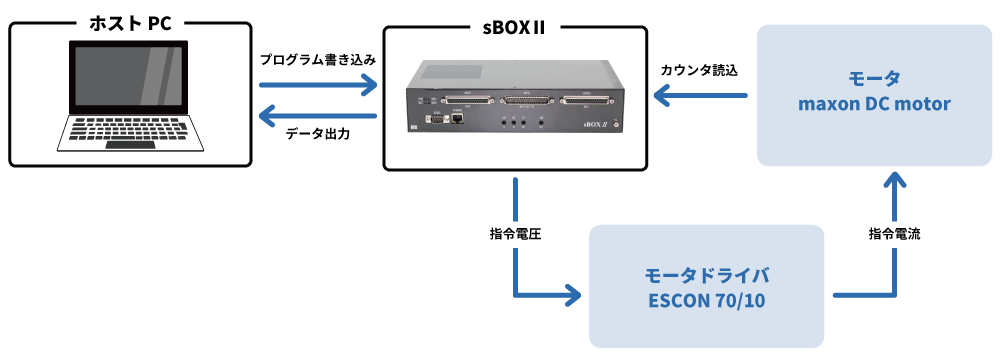
まず、ブレードを3Dプリンタで作成し、風洞施設にて実験を行いました。実験にて推定された風速精度に対応した推定風速とMATLAB®/Simulink®を使用して大型の風車を想定したモデルを作成し、個別ピッチ角制御シミュレーションを行いました。当初はマイコンの使用を検討していましたが、カウンタの読み込む位置や指令電圧の出力などがわかりにくいという課題がありました。そこで既に研究室で使用されていたsBOXⅡを用いて実験を行ったところ、ほかのコントローラに比べて配線のつなげ方がわかりやすい点や、サンプリング周波数などの精度の高さなどによりスムーズに実験を進めることができました。
Goal
個別ピッチ角制御の従来手法に比べて、ブレード負荷やピッチレートを増やすことなく、ロータ速度を定格に抑えることができました。他のコントローラに比べて配線のつなげ方がわかりやすい点や、チャンネルの数が多い点に加え、サンプリング周波数などの精度が高く、従来の方法より実験にかかるコストを削減できました。
sBOXⅡは、低価格・コンパクトながら豊富なI/Oを取り揃え、広範な用途に対応できる研究ツールです。各種ソフトウエアも付属しているので、“sBOXⅡのみあれば”すぐに実験を開始できます。
また、別売のPassソフトを使用すればMATLAB®/Simulink®により、ブロック線図で構築した制御モデルをシームレスに実現することも可能です。(MATLAB®、Simulink®、Simulink Coder™、MATLAB Coder™が必要となります。)