慶応義塾大学大学院 理工学研究科 村上俊之先生の研究室では、ロボティクス・人間の動作解析・知能制御を応用し『人とロボットの強調』をテーマとした研究を行っています。研究テーマは①移動ロボットやドローンなどの移動モビリティに関する研究、②アシストロボットやリハビリロボットなどの人支援・動作解析研究、③バイラテラル制御を用いた遠隔操作が可能な協働ロボットの研究、④二足歩行ロボットや風力発電に関する研究の4つに分かれています。今回は、②に関連した『上肢外骨格型アシストロボットのアシストトルク制御』についてご紹介します。
Purpose
日本は超高齢化社会に突入し、現在もなお高齢化率は上昇し続け、さらに事故や病気などによりアシストロボットの需要は年々高まっています。本研究では、上肢にロボットスーツのように装着し、モータのトルクで動作をアシストするロボットを開発し、人間の筋肉を含めた上肢モデルを用いてアシストトルクの大きさを決定することで、人間の筋肉の努力量が狙い通りになるようにアシストすること目的としています。人間の力の出しやすさは、上肢姿勢によって異なる為(例:重い荷物を持つ時に、腕を正面に伸ばした状態では持ち上げにくいが、腕を曲げて体に近い場所で持つと持ち上げやすい)、筋肉を含めたモデルからアシストを決定する必要がありました。
MIS Solution
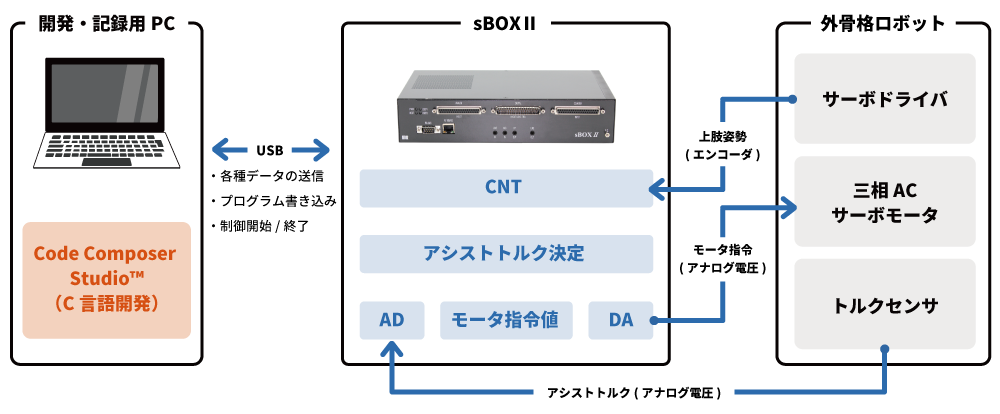
上記研究の手法の有効性を確認するため、当初はマイコンの使用を検討していました。しかしモータ指令電圧に±10Vが必要でしたが、マイコンでは+3Vまでしか出力できず、計算精度や処理速度にも不安があったため、AD、DA、CNTなどに対応したsBOXⅡを用いて荷物を持ち上げる実験を行いました。
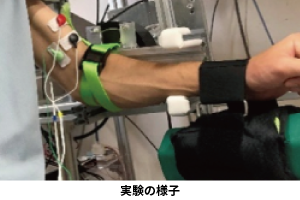
- 人間の肘関節をアシストするロボットを作成し、肘部分のモータのトルクをフィードバック制御
- エンコーダで上肢姿勢を取得し(CNT)、それに応じてアシストトルク決定
→モータのトルク制御(トルクセンサでアシストトルク取得[AD]&指令電圧出力[DA])
Goal
荷物持ち上げ動作時に人間の筋肉の努力量が狙い通りになるよう、肘関節動作をアシストできることを実験で確認しました。実験に必要なI/Oがコンパクトな筐体1台のみで揃い、狭い実験室の中でも非常に扱いやすく、さらにCode Composer Studio™に関するチュートリアル・説明書もあったので、予想していたよりも短期間で実験システムを構築することができました。現状は肘関節のアシストのみで実験しているが、今後は肩や手首もアシストし、より自由度の高い他の動作アシストの実現を目指していきます。
sBOXⅡは、低価格・コンパクトながら豊富なI/Oを取り揃え、広範な用途に対応できる研究ツールです。各種ソフトウエアも付属しているので、“sBOXⅡのみあれば”すぐに実験を開始できます。
また、別売のPassソフトを使用すればMATLAB®/Simulink®により、ブロック線図で構築した制御モデルをシームレスに実現することも可能です。(MATLAB®、Simulink®、Simulink Coder™、MATLAB Coder™が必要となります。)